1.本发明涉及
垃圾箱技术领域,尤其涉及
一种智能垃圾箱及其控制方法。
背景技术:2.近年来,各种
智能家居层出不穷,智能
垃圾箱作为智能家居的重要组成部分,占据一定的市场。智能
垃圾箱的功能有自动感应开盖、一键打包、自动换袋、自动垃圾分类等。目前,市面上最常见的是人体感应自动开盖的智能垃圾箱,包括挥手感应、屈膝感应等。用户可以与垃圾箱无任何接触即可投放垃圾,能够更好的远离细菌,降低交互感染风险。
3.现有的智能垃圾箱需要用户主动接近垃圾桶才能扔垃圾,使用不够方便。
技术实现要素:4.本发明旨在解决现有的智能垃圾箱需要用户主动接近才能扔投垃圾,导致使用不够方便的技术问题。
5.本发明提供
一种智能垃圾箱的
控制方法,包括如下步骤:
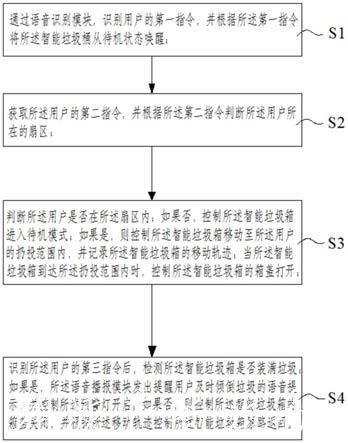
6.s1、通过语音识别模块,识别用户的第一指令,并根据所述第一指令将所述智能垃圾箱从待机状态唤醒;
7.s2、获取所述用户的第二指令,并根据所述第二指令判断所述用户所在的扇区;
8.s3、判断所述用户是否在所述扇区内;如果否,控制所述智能垃圾箱进入待机模式;如果是,则控制所述智能垃圾箱移动至所述用户的扔投范围内,并记录所述智能垃圾箱的移动轨迹;当所述智能垃圾箱到达所述扔投范围内时,控制所述智能垃圾箱的箱盖打开;
9.s4、识别所述用户的第三指令后,检测所述智能垃圾箱是否装满垃圾;如果是,所述语音播报模块发出提醒用户及时倾倒垃圾的语音提示,并控制所述预警灯开启;如果否,则控制所述智能垃圾箱的箱盖关闭,并根据所述移动轨迹控制所述智能垃圾箱原路返回。
10.在一些优选地实施例中,步骤s2中,获取所述用户的第二指令,并根据所述第二指令判断所述用户所在的扇区的具体方法如下:
11.s21、采集语音信号;
12.s22、对所述语音信号进行预处理,提取所述用户的第二指令;
13.s23、获取所述麦克风阵列中三个麦克风接收到所述第二指令声波的时延差;根据所述时延差确定所述用户相对于所述智能垃圾箱的平均方位角,并根据所述平均方位角确定所述用户所在的扇区。
14.在一些优选地实施例中,步骤s3中,
党建宣传栏,所述扔投范围为所述智能垃圾箱距离所述用户30
‑
50厘米以内的范围。
15.在一些更加优选地实施例中,步骤s22中,所述预处理的具体方法如下:
16.t1、预加重处理:对所述语音信号中频率为300
‑
3400hz部分进行加重;
17.t2、对步骤t1处理后的所述语音信号加汉明窗分帧处理;
18.t3、对步骤t2处理后的所述语音信号进行端点检测,提取所述第二指令。
19.在一些更加优选地实施例中,步骤s23中,获取所述麦克风阵列中三个麦克风接收到所述第二指令声波的时延差;根据所述时延差确定所述用户相对于所述智能垃圾箱的平均方位角,并根据所述平均方位角确定所述用户所在的扇区的具体方法如下:
20.p1、获取三个所述麦克风接收到所述第二指令声波的时延差,并根据公式(1)、公式(2)和公式(3)分别计算所述用户相对于三个所述麦克风的方位角α、方位角β和方位角γ,并计算所述方位角α、方位角β和方位角γ的平均值,即为所述用户相对于所述智能垃圾箱的平均方位角;
[0021][0022][0023][0024]
其中,将三个所述麦克风分别记为麦克风a、麦克风b和麦克风c;τ
ab
为所述麦克风a和所述麦克风b之间的时延差;τ
bc
为所述麦克风b和所述麦克风c之间的时延差;τ
ac
为所述麦克风a和所述麦克风c之间的时延差;|ab|为所述麦克风a和所述麦克风b之间的距离;|bc|为所述麦克风b和所述麦克风c之间的距离;|ac|为所述麦克风a和所述麦克风c之间的距离;v为声速;
[0025]
p2、以三个所述麦克风之间的连线组成的三角形的重心作为极点,建立极坐标系,并定义所述智能垃圾箱的正面为所述极坐标系的零度;将所述极坐标系均匀划分成16个扇区,根据所述平均方位角确定所述用户所在的扇区。
[0026]
本发明还提出一种智能垃圾箱,包括垃圾箱本体、单片机和分别与所述单片机电性连接的语音识别模块、麦克风阵列模块、红外寻人模块、超声波测距模块、满载检测模块、语音播报模块、预警灯、舵机开盖模块和电机驱动模块;
[0027]
所述语音识别模块设置在所述垃圾箱本体上,用于识别用户的第一指令和第三指令,并用于根据所述第一指令将所述智能垃圾箱从待机状态唤醒;
[0028]
所述麦克风阵列模块设置在所述垃圾箱本体的外侧,用于获取所述用户的第二指令;
[0029]
所述红外寻人模块设置在所述垃圾箱本体的外侧,用于判断所述用户是否在所述扇区内;
[0030]
所述超声波测距模块设置在所述垃圾箱本体的外侧,用于测量所述智能垃圾箱与所述用户之间的距离;
[0031]
所述满载检测模块设置在所述垃圾箱本体的内部,用于检测所述智能垃圾箱是否装满垃圾;
[0032]
所述语音播报模块设置在所述垃圾箱本体上,用于播报语音提示;
[0033]
所述舵机开盖模块设置在所述垃圾箱本体上,用于驱动所述垃圾箱本体上的箱盖打开或者关闭;
[0034]
所述电机驱动模块设置在所述垃圾箱本体上,用于驱动所述智能垃圾箱移动;
[0035]
所述单片机设置在所述垃圾箱本体上,用于根据所述第二指令判断所述用户所在
的扇区;当确认所述用户不在所述扇区时,所述单片机用于控制所述智能垃圾箱进入待机模式;当确认所述用户在所述扇区时,所述单片机用于控制所述智能垃圾箱移动至所述用户的扔投范围内,并用于记录所述智能垃圾箱的移动轨迹;当所述智能垃圾箱到达所述扔投范围内时,所述单片机用于控制所述舵机开盖模块驱动所述智能垃圾箱的箱盖打开;当所述智能垃圾箱装满垃圾时,所述单片机用于控制所述语音播报模块发出提醒用户及时倾倒垃圾的语音提示,并控制所述预警灯开启;当所述智能垃圾箱未装满垃圾时,所述单片机用于根据所述移动轨迹控制所述智能垃圾箱原路返回。
[0036]
本发明的实施例提供的技术方案带来的有益效果是:通过将本发明中的智能垃圾箱的控制方法用于所述智能垃圾箱的控制,当用户需要扔投垃圾时,直接通过语音即可控制所述智能垃圾箱主动移动至所述用户的扔投范围内,使用方便;同时,具备主动开盖和满载提醒的功能。
附图说明
[0037]
图1为本发明某一实施例中智能垃圾箱的控制方法的
流程示意图;
[0038]
图2为本发明某一实施例中智能垃圾箱的立体结构示意图;
[0039]
图3为图2中智能垃圾箱的另一立体结构示意图;
[0040]
图4为图2中智能垃圾箱的底部结构示意图;
[0041]
图5为图2中智能垃圾箱的电路连接示意图;
[0042]
图6为图2智能垃圾箱中麦克风的空间分布及远场模型示意图;
[0043]
其中,1、垃圾箱本体;101、箱盖;102、滚轮;2、被动红外探测器;3、麦克风;4、语音识别模块;5、超声波测距模块;6、语音播报模块;7、红外对射式光电开关发射器;8、红外对射式光电开关接收器;9、舵机开盖模块;10、单片机;11、电机驱动模块。
具体实施方式
[0044]
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
[0045]
请参考图2至图5,本发明的实施例提供了一种智能垃圾箱,包括垃圾箱本体1、单片机10和分别与所述单片机10电性连接的语音识别模块4、麦克风阵列模块、红外寻人模块、超声波测距模块5、满载检测模块、语音播报模块6、预警灯、舵机开盖模块9和电机驱动模块11。
[0046]
语音识别模块4设置在垃圾箱本体1上,用于识别用户的第一指令和第三指令,并用于根据所述第一指令将所述智能垃圾箱从待机状态唤醒;所述第一指令为用户发出的声音指令,示例性地,所述第一指令可以为“小智”;当语音识别模块4接收并识别出所述用户发出的第一指令时,所述智能垃圾箱从待机状态被唤醒至工作状态;所述第三指令为用户发出的声音指令,示例性地,所述第三指令可以为“回去”;
[0047]
示例性地,在本实施例中,语音识别模块4的型号为ld3320。
[0048]
所述麦克风阵列模块设置在垃圾箱本体1的外侧,用于获取所述用户的第二指令;所述麦克风阵列包括三个均匀分布在垃圾箱本体1外侧的麦克风3;三个麦克风3分别位于等边三角形的三个顶点处;麦克风3用于采集所述用户的所述第二指令;所述第二指令为用
户发出的声音指令;所述麦克风阵列与单片机10配合,能够通过所述用户第二指令确定所述用户相对于所述智能垃圾箱的平均方位角。
[0049]
示例性地,在本实施例中,麦克风3的型号为lm386。
[0050]
所述红外寻人模块设置在垃圾箱本体1的外侧,用于判断所述用户是否在所述扇区内;所述红外寻人模块包括八个均匀分布在垃圾箱本体1外侧的被动红外探测器2;八个被动红外探测器2分布在同一圆周上。
[0051]
示例性地,在本实施例中,被动红外探测器2的型号为hc
‑
sr501。
[0052]
超声波测距模块5设置在垃圾箱本体1的外侧,用于测量所述智能垃圾箱与所述用户之间的距离。
[0053]
示例性地,在本实施例中,超声波测距模块5的型号为hc
‑
sr04。
[0054]
所述满载检测模块设置在垃圾箱本体1的内部,用于检测所述智能垃圾箱是否装满垃圾;所述满载检测模块包括红外对射式光电开关发射器7和红外对射式光电开关接收器8;红外对射式光电开关发射器7和红外对射式光电开关接收器8相对设置在垃圾箱本体1的内侧;当垃圾箱本体1内部的垃圾装满隔档在红外对射式光电开关发射器7和红外对射式光电开关接收器8时,红外对射式光电开关接收器8不能接收红外对射式光电开关发射器7发出的红外信号,从而判断垃圾箱本体1内装满了垃圾,并向单片机10发送满载信号;单片机10接收所述满载信号后,控制语音播报模块6发出语音提示:“请及时倾倒垃圾”,并控制所述预警灯开启,从而提醒用户倾倒垃圾。
[0055]
语音播报模块6设置在垃圾箱本体1上,用于播报语音提示;语音播报模块6除了提示用户及时倾倒垃圾外,还用于对用户的所述第一指令、所述第二指令和所述第三指令进行反馈;示例性地,对所述第一指令、所述第二指令和所述第三指令进行反馈语音提示可以为“好的”。
[0056]
示例性地,在本实施例中,语音播报模块6的型号为jq8400。
[0057]
舵机开盖模块9设置在垃圾箱本体1上,
宣传栏,用于驱动垃圾箱本体1上的箱盖101打开或者关闭。
[0058]
示例性地,在本实施例中,舵机开盖模块9的型号为sg90。
[0059]
电机驱动模块11设置在垃圾箱本体1上,用于驱动所述智能垃圾箱移动;电机驱动模块11设置在垃圾箱本体1的底部;电机驱动模块11与垃圾箱本体1底部的滚轮102传动连接,用于驱动滚轮102转向或者转动;电机驱动模块11能够驱动所述智能垃圾箱完成转向、直行、后退等操作。
[0060]
示例性地,在本实施例中,电机驱动模块11的型号为l298n。
[0061]
单片机10设置在垃圾箱本体1上,用于根据所述第二指令判断所述用户所在的扇区;当确认所述用户不在所述扇区时,单片机10用于控制所述智能垃圾箱进入待机模式;当确认所述用户在所述扇区时,单片机10用于控制所述智能垃圾箱移动至所述用户的扔投范围内,
滚动广告灯箱,并用于记录所述智能垃圾箱的移动轨迹;当所述智能垃圾箱到达所述扔投范围内时,单片机10用于控制舵机开盖模块9驱动智能垃圾箱的箱盖101打开;当所述智能垃圾箱装满垃圾时,单片机10用于控制语音播报模块6发出提醒用户及时倾倒垃圾的语音提示,并控制所述预警灯开启;当所述智能垃圾箱未装满垃圾时,单片机10用于根据所述移动轨迹控制所述智能垃圾箱原路返回。
[0062]
示例性地,在本实施例中,单片机10的型号为stm32。
[0063]
参考图1,本实施例中的智能垃圾箱的控制方法包括如下步骤:。
[0064]
s1、通过语音识别模块4,识别用户的第一指令,并根据所述第一指令将所述智能垃圾箱从待机状态唤醒;当所述用户需要扔投垃圾时,发出第一指令“小智”;语音识别模块4识别所述用户发出的所述第一指令后,控制所述智能垃圾箱进入工作状态。
[0065]
s2、获取所述用户的第二指令,并根据所述第二指令判断所述用户所在的扇区;当所述智能垃圾箱进入工作状态后,所述用户需要发出所述第二指令;所述麦克风阵列模块采集到所述第二指令后,与单片机10配合,判断所述用户所在的扇区。
[0066]
s3、所述红外寻人模块判断所述用户是否在所述扇区内;如果否,通过单片机10控制所述智能垃圾箱进入待机模式;如果是,则通过单片机10控制所述智能垃圾箱移动至所述用户的扔投范围内,并记录所述智能垃圾箱的移动轨迹;当所述智能垃圾箱到达所述扔投范围内时,通过单片机10控制电机驱动模块11驱动所述智能垃圾箱的箱盖101打开。
[0067]
为了方便用户将垃圾扔投至垃圾箱本体1内,所述扔投范围为所述智能垃圾箱距离所述用户30
‑
50厘米以内的范围;具体地,在本实施例中,所述扔投范围为40厘米;当所述智能垃圾箱移动至距离所述用户40厘米时,停止移动。
[0068]
s4、语音识别模块4识别所述用户的第三指令后,首先通过所述满载检测模块检测所述智能垃圾箱是否装满垃圾;如果是,语音播报模块6发出提醒用户及时倾倒垃圾的语音提示,并控制所述预警灯开启;如果否,则控制所述智能垃圾箱的箱盖101关闭,并根据所述移动轨迹控制所述智能垃圾箱原路返回。
[0069]
示例性地,在本实施例中,所述第三指令可以为“回去”。
[0070]
所述智能垃圾箱的原路返回功能主要基于单片机10对寻找所述用户过程的记录,单片机10将寻找所述用户过程中的各段数据储存到单片机10的rom中并将其逆回去,从而实现原路返回功能,在硬件上无需添加新的模块。
[0071]
具体地,步骤s2中,
候车亭,获取所述用户的第二指令,并根据所述第二指令判断所述用户所在的扇区的具体方法如下:
[0072]
s21、采集语音信号;
[0073]
s22、对所述语音信号进行预处理,提取所述用户的第二指令;
[0074]
具体地,所述预处理的具体方法如下:
[0075]
t1、预加重处理:对所述语音信号中频率为300
‑
3400hz部分进行加重;
[0076]
t2、对步骤t1处理后的所述语音信号加汉明窗分帧处理;
[0077]
t3、对步骤t2处理后的所述语音信号进行端点检测,提取所述第二指令。
[0078]
s23、获取所述麦克风阵列中三个麦克风3接收到所述第二指令声波的时延差;根据所述时延差确定所述用户相对于所述智能垃圾箱的平均方位角,并根据所述平均方位角确定所述用户所在的扇区。
[0079]
具体地,参考图6,确定所述用户所在的扇区的具体方法如下:
[0080]
p1、获取三个麦克风3接收到所述第二指令声波的时延差,并根据公式(1)、公式(2)和公式(3)分别计算所述用户相对于三个麦克风3的方位角α、方位角β和方位角γ,
户外滚动灯箱,并计算所述方位角α、方位角β和方位角γ的平均值,即为所述用户相对于所述智能垃圾箱的平均方位角;
[0081][0082][0083][0084]
其中,将三个麦克风3分别记为麦克风a、麦克风b和麦克风c;τ
ab
为所述麦克风a和所述麦克风b之间的时延差;τ
bc
为所述麦克风b和所述麦克风c之间的时延差;τ
ac
为所述麦克风a和所述麦克风c之间的时延差;|ab|为所述麦克风a和所述麦克风b之间的距离;|bc|为所述麦克风b和所述麦克风c之间的距离;|ac|为所述麦克风a和所述麦克风c之间的距离;v为声速;
[0085]
p2、以三个麦克风3之间的连线组成的三角形的重心作为极点,建立极坐标系,并定义所述智能垃圾箱的正面为所述极坐标系的零度;将所述极坐标系均匀划分成16个扇区,根据所述平均方位角确定所述用户所在的扇区。
[0086]
在本实施例中,假设声速波长为λ,麦克风3之间的距离为d,声源与麦克风3之间的距离为r,若则符合远场模型,即视声源信号近似为平面波,反之为近场模型,视声源信号近似为球面波。因为通常情况下,用户发出的语音信号的频率范围为300
‑
3400hz;
[0087]
示例性地,本实施例中三个麦克风3之间的距离为12cm,故采用远场模型。
[0088]
在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
[0089]
在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
[0090]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。


